Driver del motore passo -passo TB6600HG: specifiche, funzionalità e applicazioni
Catalogare
Descrizione TB6600HG

TB6600HG è un driver del motore bipolare a chip singolo a chip singolo PWM.Può ottenere il controllo di rotazione in avanti e inverso attraverso le modalità di eccitazione 2-fase, 1-2-fase, W1-2-fase, 2w1-2-fase e 4w1-2-fase.I motori a passo bipolare in due fasi sono guidati esclusivamente da un segnale di clock ad alta efficienza a bassa vibrazione.
Alternative ed equivalenti:
• TB6600fg
• L6258EX
Specifiche di TB6600HG
• Stato della parte: attivo
• Packaging: vassoio
• Pacchetto / custodia: Hzip-25
• Produttore: Toshiba
• Corrente di alimentazione operativa: 4,2 Ma
• Tensione di alimentazione operativa: da 2 V a 5,5 V.
• Punteggio di tensione di carico: da 8 V a 42 V.
• Numero di uscite: 2 output
• PD - Dissipazione di potenza: 40 W
• Stile di montaggio: attraverso il buco
• Lunghezza/larghezza/altezza del pacchetto: 29,3 mm (max) /4,5 mm/15.7 mm
• Categoria del prodotto: controller e driver motori / movimenti / accensione
Condizioni operative di TB6600HG
(TA = -30 ° C a 85 ° C)
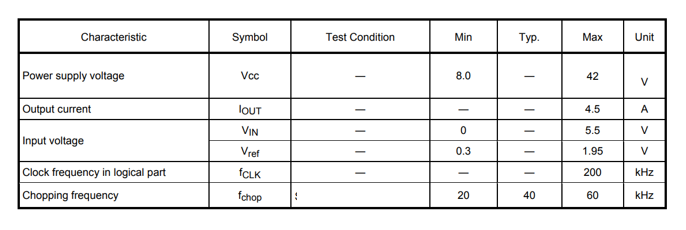
Nota: due terminali VCC devono essere programmati nella stessa tensione.La corrente massima dell'intervallo operativo non può essere necessariamente condotta a seconda di varie condizioni perché la corrente di uscita è limitata dal PD di dissipazione di potenza.Assicurati di evitare di usare l'IC nella condizione che farà superare la temperatura TJ (AVG.) = 107 ° C.
La tensione di alimentazione di 42 V e la corrente di uscita di 4,5 A sono i valori massimi dell'intervallo operativo.Si prega di progettare il circuito con abbastanza derante all'interno di questo intervallo considerando la variazione dell'alimentazione, la resistenza esterna e le caratteristiche elettriche dell'IC.In caso di superamento della tensione di alimentazione di 42 V e della corrente di uscita di 4,5 A, l'IC non funzionerà normalmente.
Come collegare TB6600HG al sistema di controllo?
Connessione di alimentazione: in primo luogo, assicurarsi di fornire un alimentatore adeguato a TB6600HG.Quando si alimenta TB6600HG, di solito è necessario collegare due pin: VCC (alimentazione positiva) e GND (filo di terra).Il pin VCC è responsabile della fornitura della tensione richiesta per guidare il chip, mentre il pin GND funge da livello di terra di riferimento.Dobbiamo garantire che l'alimentazione sia stabile e soddisfi le specifiche del TB6600HG.
Connessione del segnale: in base alle esigenze specifiche del sistema di controllo, dobbiamo collegare il segnale di controllo al pin corrispondente del chip del driver TB6600HG.Questi segnali di controllo di solito includono segnali di controllo della direzione e segnali di impulsi, ecc., Che sono responsabili di istruire come agisce il motore, compresa la direzione di rotazione e la velocità di rotazione.
Collegamento del motore: dobbiamo stare particolarmente attenti quando si collega il motore al chip driver TB6600HG.I due fili del motore, di solito rosso e nero, rappresentano rispettivamente i poli positivi e negativi del motore.Il filo rosso di solito si collega al terminale positivo del motore, mentre il filo nero si collega al terminale negativo.
Connessione di feedback (facoltativo): se un encoder viene utilizzato per il controllo di feedback, dobbiamo anche collegare il segnale di uscita dell'encoder al sistema di controllo.Ciò include in genere le uscite di Fase A, Fase B e Fase Z (se disponibili).
Grounding: dobbiamo garantire che il filo di terra comune di tutte le apparecchiature sia collegata correttamente per evitare interferenze e danni.
Impostazioni di inizializzazione: al termine della connessione, dobbiamo inizializzare le impostazioni del TB6600HG per assicurarsi che funzioni correttamente.Ciò può includere l'impostazione dei limiti di corrente, delle modalità di passo, ecc.
Funzioni del prodotto TB6600HG
• Adottare un radiatore ingrandito per una buona dissipazione del calore
• Le istruzioni di configurazione della suddivisione sono stampate sul retro della scheda
• Con funzione di protezione del corto circuito in uscita, uso senza preoccupazioni
• Adottare l'accoppiamento ottico ad alta velocità 6N137 per garantire un'alta velocità senza perdita di sincronizzazione
• La corrente di output è correttamente regolabile per soddisfare le varie esigenze dell'applicazione
• Utilizzando la modalità di input anodo comune, ci sono due terminali di input, che rendono il cablaggio più conveniente
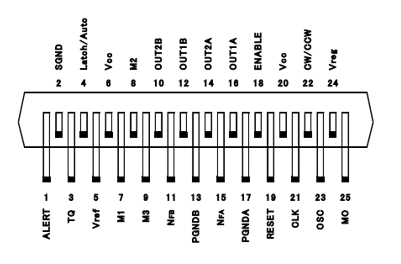
Configurazione del pin di TB6600HG
Descrizione della funzione di TB6600HG
Impostazioni di eccitazione
La modalità di eccitazione può essere selezionata dalle seguenti otto modalità utilizzando gli ingressi M1, M2 e M3.Quando gli ingressi M1, M2 o M3 vengono spostati durante il funzionamento del motore, una nuova modalità di eccitazione inizia dalla modalità iniziale, interrompendo potenzialmente la continuità della forma d'onda di corrente di uscita.
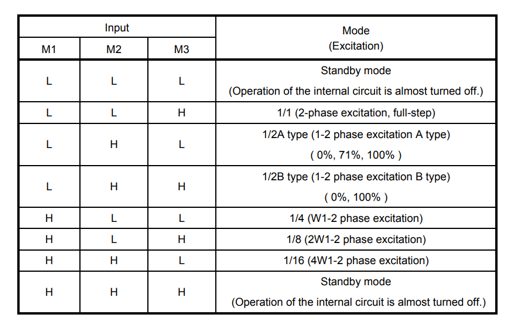
Nota: per modificare la modalità eccitante modificando M1, M2 e M3, assicurati di non impostare M1 = M2 = M3 = L o M1 = M2 = M3 = H.
Modalità di standby
La modalità operativa si sposta in modalità di standby nella condizione M1 = M2 = M3 = L o M1 = M2 = M3 = H. Il consumo di energia è ridotto al minimo disattivando tutte le operazioni se non proteggendo il funzionamento.In modalità standby, il terminale di uscita MO è HZ.La modalità di standby viene rilasciata modificando lo stato di M1 = M2 = M3 = L e M1 = M2 = M3 = H ad altro stato.Il segnale di ingresso non è accettato per circa 200 μs dopo aver rilasciato la modalità di standby.
Modalità di decadimento
La ricarica e lo scarico di una corrente in modalità PWM richiedono in genere circa cinque cicli in OSCM.La modalità di decadimento rapida del 40 percento viene avviata inducendo il decadimento entro i due cicli finali della modalità di decadimento rapido, con il rapporto del 40 percento rimasto costantemente fisso.La relazione tra la frequenza di clock principale (FMCLK), la frequenza OSCM (FOSCM) e la frequenza PWM (FCHOP) sono mostrate come segue:
foscm = 1/20 × fmclk
fChop = 1/100 × fmclk
Quando ROSC = 51KΩ, l'orologio principale = 4MHz, OSCM = 200KHz, la frequenza di PWM (FCHOP) = 40KHz.
Modalità iniziale
Quando viene utilizzato il ripristino, le correnti di fase sono le seguenti.
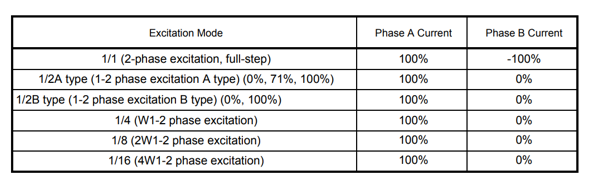
La direzione corrente è definita come segue.
Out1a → out2a: direzione in avanti
Out1b → out2b: direzione in avanti
Applicazione di TB6600HG
Di seguito sono elencate alcune applicazioni di TB6600HG.
• Luci di coda
• Edifici per l'ospitalità
• Grande display a LED esterno
• Alternativa alle luci nascoste
• Luci industriali ad altissima bay
• Formatta di grande retroilluminazione a LED
• Visualizza retroilluminazione a LED
• Smartphone abilitati per la fotocamera
• Topologie del driver Step-up o Step-Down
Guasti e soluzioni comuni di TB6600HG
Il seguente elenca alcuni guasti comuni su TB6600HG e le loro soluzioni per aiutarti a intraprendere un'azione rapida quando si incontrano guasti e salvaguardano il normale funzionamento del dispositivo.
Orcavo uno: surriscaldamento del chip del driver
Il chip TB6600HG stesso è troppo caldo, probabilmente a causa di un carico eccessivo o di scarse condizioni di dissipazione del calore.
Soluzione: migliorare la dissipazione del calore
Dobbiamo aggiungere dissipatori di calore o ventole sul chip e sul motore del conducente per assicurarci che possano dissipare completamente il calore durante il lavoro.Allo stesso tempo, dobbiamo mantenere l'ambiente attorno al chip del conducente e al motore ben ventilato per evitare il surriscaldamento.
Errore due: il motore ruota nella direzione sbagliata
Dopo che il motore ha ricevuto il segnale di azionamento, la direzione di rotazione non è in linea con il previsto, potrebbe essere il segnale di controllo è sbagliato o il chip di azionamento non è correttamente configurato.
Soluzione: controlla il segnale di controllo
Dobbiamo controllare attentamente i segnali di controllo inviati al TB6600HG per garantire che il segnale di controllo della direzione e il segnale dell'impulso siano corretti.Se un microcontrollore viene utilizzato per inviare i segnali, controllare il codice del programma e la configurazione del pin.
Errore tre: il motore non riesce a ruotare
Il motore non risponde dopo aver ricevuto il segnale di azionamento, è possibile che il chip del conducente non funzioni correttamente o che vi sia un problema con la connessione tra il motore e il chip del driver.
Soluzione: controllare l'alimentazione e la connessione
Dobbiamo assicurarci che l'alimentazione del TB6600HG sia normale e che la connessione tra il motore e il chip del conducente sia solida.Controlliamo la tensione e la corrente nel circuito utilizzando un multimetro per assicurarsi che siano nell'intervallo normale.
Fallimento quattro: riscaldamento motorio serio
Il motore genera calore eccessivo durante il funzionamento, che può essere causato da una corrente eccessiva o da una scarsa dissipazione del calore.
Soluzione: regola l'impostazione corrente
Se il motore sta generando un calore serio, possiamo provare a ridurre la corrente di uscita del chip del driver.Regolando il pin di impostazione della corrente di TB6600HG, possiamo effettivamente limitare le dimensioni della corrente di uscita, che a sua volta riduce l'onere sul motore e garantisce un funzionamento stabile e sicuro del motore.
Domande frequenti [FAQ]
1. Qual è l'intervallo di temperatura operativa di TB6600HG?
La temperatura operativa di TB6600Hg varia da -30 ° C a 85 ° C.
2. Che cos'è TB6600HG?
TB6600HG è un tipo di driver a motore passo -passo, progettato per controllare i motori Stepper in varie applicazioni come macchine a CNC, stampanti 3D, robotica e sistemi di automazione.
3. Quali sono le caratteristiche chiave di TB6600HG?
Le funzionalità TB6600HG includono corrente del motore regolabile, impostazioni di risoluzione del passaggio, protezione di surriscaldamento integrata e ingressi opto-isolati per il controllo del segnale.