Driver motori L298N: caratteristiche, schemi circuiti e applicazioni
Catalogare
Introduzione a L298N
L298n è una versione del pacchetto verticale di L298.È un chip con driver a motore a ponte pieno a doppio canale che può accettare alta tensione e corrente elevata.La sua tensione di lavoro può raggiungere 46 V e la sua corrente di uscita massima è 4a.Inoltre, L298N ha anche due terminali di controllo abilitati.Questi terminali di controllo consentono di regolare dinamicamente la modalità di lavoro del circuito collegando e scollegando il jumper di bordo senza essere interferiti dal segnale di ingresso.L298N è dotato di un ingresso di alimentazione logica, che consente alla porzione del circuito logico interno di funzionare a bassa tensione.Allo stesso tempo, può anche produrre una tensione logica di 5 V esternamente.Al fine di evitare danni al chip di stabilizzazione della tensione, quando si utilizza una tensione di guida superiore a 12 V, si consiglia vivamente di utilizzare un'interfaccia 5V esterna per l'alimentazione indipendente.
L298N controlla il terminale di ingresso I/O sul chip di controllo principale e regola la tensione di uscita direttamente attraverso l'alimentazione per realizzare il retro, invertire e arresto del motore.Normalmente, L298N può guidare direttamente relè (a quattro vie), solenoidi, valvole per solenoidi, due motori CC e un motore a passo passo (due-fasi o quattro a quattro fasi).
Alternative ed equivalenti:
• E-L298N
• L298HN
• LM18298T
Caratteristiche funzionali di L298N
Compatibilità dell'input logico: l'input logico di L298N è compatibile con TTL, CMOS e altri livelli logici.
Protezione di surriscaldamento: L298N ha una funzione di protezione del surriscaldamento.Quando la temperatura del chip è troppo elevata, disconnetterà automaticamente l'output.
Diodo di polarità libero incorporato: L298N ha un diodo di polarità libero incorporato, che può essere utilizzato per la frenata dei motori DC.
Output di corrente grande: L298N può fornire una corrente di uscita di grandi dimensioni ed è adatto per alcune applicazioni che richiedono una corrente di guida elevata.
Struttura a doppio ponte H: L298N integra una doppia struttura a ponte H, che può controllare lo sterzo e la velocità di due motori DC o motori a passo passo.
Diagramma del circuito L298N
Il diagramma del circuito di L298N è il seguente:
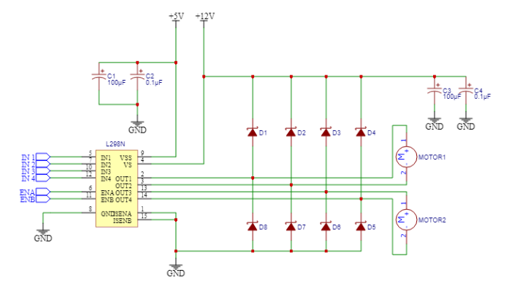
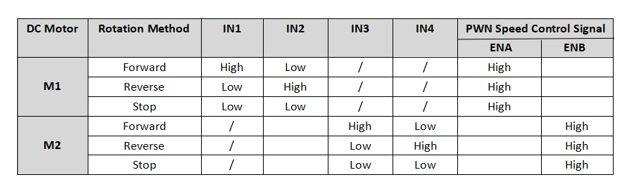
Out1, out2 ed out3, out4 sono collegati a motor1, motor2;In1, in2, in3, in4 pin dal microcontrollore per accedere al livello di controllo, per controllare il motore in avanti e invertire;ENA, ENB collegato al controllo del terminale abilitato, per controllare la velocità del motore.Il diagramma di relazione logica di controllo L298N è il seguente:
Per quanto riguarda la regolamentazione della velocità del motore, abbiamo adottato il metodo di regolazione della velocità PWM.Il principio sta nel realizzare la regolazione della velocità controllando il tempo di conduzione T del tubo di commutazione in un ciclo.La tensione media U attraverso il motore durante un ciclo completo T può essere espressa come U = VCC × (T/T) = A × VCC.Dove, a = t/t, è noto come duty cycle e VCC rappresenta la tensione di alimentazione.La velocità del motore è proporzionale alla tensione attraverso il motore, mentre la tensione attraverso il motore è proporzionale al ciclo di lavoro della forma d'onda di controllo.Pertanto, esiste una relazione proporzionale tra la velocità del motore e il ciclo di lavoro: maggiore è il ciclo di lavoro, maggiore è la velocità del motore.
Metodo di controllo di L298N
Quando si utilizza L298N, dobbiamo inserire segnali di controllo su IN1, IN2, IN3 e IN4 per controllare la rotazione e la velocità in avanti e inversa del motore.Ecco diversi metodi di controllo:
Modalità di controllo PWM
La modalità PWM può controllare efficacemente la velocità del motore.Quando si utilizza la modalità PWM, è necessario utilizzare i due pin EN1 e EN2 per regolare la velocità del motore.In particolare, quando i pin EN1 e EN2 sono ad alto livello, il motore funzionerà normalmente;Quando sono a basso livello, il motore smetterà di ruotare.
Modalità di controllo a senso unico
Quando in1, in2, in3 e in4 sono di alto livello allo stesso tempo, il motore ruota in avanti;Quando due porte di input sono di alto livello e le altre due porte di input sono a basso livello, il motore ruota recepamente.
Modalità di controllo bidirezionale
Quando si utilizzano la modalità di controllo bidirezionale, IN1 e IN2 sono responsabili del controllo del motore 1, mentre IN3 e IN4 sono responsabili del controllo del motore 2. In particolare, quando IN1 è di alto livello e IN2 è basso, il motore 1 ruoterà in avanti;Al contrario, quando IN1 è di basso livello e IN2 è di alto livello, il motore 1 ruoterà retromarcia.Allo stesso modo, la logica di controllo di IN3 e IN4 è anche applicabile al controllo di rotazione in avanti e inverso del motore 2.
Diagramma dei pin e funzioni di L298N
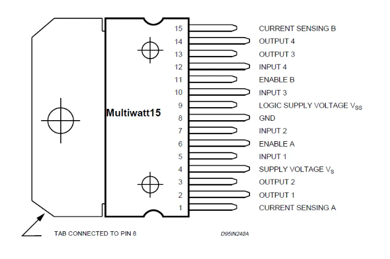
Pin di potenza
Vs: ingresso di tensione di alimentazione (fino a 46V)
GND: Pin di terra
Pin di controllo logico
In1, in2: usato per controllare la direzione di rotazione del motore 1
In3, in4: usato per controllare la direzione di rotazione del motore 2
Pin di controllo del motore:
Out1, out2: usato per controllare la direzione del motore 1
Out3, out4: usato per controllare la direzione del motore 2
ENA: abilita il pin, utilizzato per controllare la velocità del motore 1
ENB: abilita il pin, utilizzato per controllare la velocità del motore 2
Come usare L298N?
Collegare l'alimentazione: l'alimentazione del modulo driver L298N dovrebbe essere mantenuto nell'intervallo da 12 V a 35 V.In applicazioni pratiche, al fine di garantire la stabilità dell'alimentazione, potremmo anche dover filtrare l'alimentazione.
Collegare i motori: colleghiamo i due motori ai pin di uscita della L298N attraverso il driver e il livello di controllo viene inserito direttamente sul motore attraverso L298N.
Controllo L298N: utilizziamo la porta di controllo (abilitazione, pin di controllo) per controllare la L298N.Dobbiamo impostare lo stato della porta di abilitazione e del pin di controllo quando si assegnano i valori.Questi stati determineranno lo stato di livello dell'output L298N.Modificando questi stati, possiamo controllare efficacemente la rotazione e la velocità in avanti e inversa del motore.
Come usare PWM per regolare la velocità del motore?
Se vogliamo utilizzare PWM per regolare la velocità del motore, abbiamo due metodi di cablaggio:
Metodo di cablaggio uno (consigliato):
Rimuoviamo il cappuccio del jumper tra il canale abilita e 5 V, colleghiamo il pin di abilitazione al pin PWM di Arduino e colleghiamo i pin 1 e 2 ai due pin normali di Arduino.In questo modo, possiamo controllare l'interruttore del canale attraverso il pin PWM per regolare la velocità del motore;Controllando lo stato del livello dei pin 1 e 2, possiamo controllare la direzione di rotazione del motore.Questo modo di cablaggio richiede solo l'uso di un perno PWM per canale, ma occupa due pin normali.Pertanto, nelle applicazioni pratiche, dobbiamo pesare e scegliere tra più metodi di cablaggio in base al numero di pin disponibili sull'Arduino.
Metodo di cablaggio due (non consigliato):
Non rimuoviamo il jumper tra abilitazione del canale e 5V, quindi il canale rimarrà continuamente aperto.Quindi, abbiamo collegato i pin 1 e 2 rispettivamente alle due interfacce PWM di Arduino.Controllando le uscite corrispondenti rispettivamente a questi due pin, possiamo controllare la direzione e la velocità di rotazione del motore.Ovviamente, questo metodo di cablaggio occuperà più pin PWM, perché ogni canale richiede due pin PWM per il controllo.Tuttavia, questo metodo non occupa pin comuni.Pertanto, non consigliamo di utilizzare questo schema di cablaggio quando le risorse PWM PIN sono strette.
Dove viene usato L298N?
Veicoli elettrici: L298N può essere utilizzato per controllare i motori di trasmissione nei veicoli elettrici, come biciclette elettriche, scooter, ecc. Ad esempio, nelle biciclette, controllando con precisione la velocità di rotazione e la direzione del motore, L298N può raggiungere l'accelerazione, la decelerazione eGuida stabile di biciclette elettriche.Il pilota può trasmettere istruzioni a L298N utilizzando il manico o i pulsanti, controllando così l'uscita del motore per realizzare l'unità in bicicletta secondo i desideri del pilota.
Equipaggiamento industriale automatizzato: nel campo dell'automazione industriale, L298N può essere utilizzato per controllare i motori di varie attrezzature industriali, come le cinture del trasportatore, le armi robotiche, i robot industriali, ecc. Nel braccio robotico, la L298N controlla accuratamente ilAngolo di rotazione e velocità del motore, consentendo al braccio robotico di muoversi secondo una traiettoria predeterminata e ottenere un funzionamento ad alta precisione.Ciò non solo migliora l'efficienza della produzione, ma riduce anche le perdite di produzione causate da errori operativi.
Tecnologia dei robot: L298N è spesso utilizzato nei progetti di robot per controllare il motore di guida per realizzare il movimento e l'azione del robot.I robot industriali spesso devono svolgere lavori a carico grave e ad alta precisione e hanno requisiti estremamente elevati sui motori di guida.L298N fornisce un potente supporto energetico per i robot industriali con la sua eccellente capacità di guida e stabilità.Che si tratti di maneggevolezza, assemblaggio o ispezione, L298N può garantire che i robot industriali completino le attività in modo accurato ed efficiente.
Smart Home: in Smart Home Systems, L298N può essere utilizzato per controllare i motori di tende, tende, porte e altre attrezzature per ottenere il controllo automatizzato.Combinando con i sensori, le apparecchiature domestiche possono essere regolate automaticamente in base all'illuminazione, alla temperatura e ad altre condizioni.
Sistema di monitoraggio solare: nei sistemi solari, L298N può essere utilizzato per controllare l'angolo di inclinazione dei pannelli solari per implementare un sistema di tracciamento solare.Attraverso il controllo di L298N, il sistema di tracciamento solare può percepire i cambiamenti di posizione del sole in tempo reale e regolare di conseguenza l'angolo di inclinazione dei pannelli solari.Questo processo di aggiustamento dinamico garantisce che i pannelli solari mantengano sempre l'angolo ottimale per il sole, migliorando così l'efficienza della raccolta energetica dei pannelli solari.
Domande frequenti [FAQ]
1. Può la velocità di controllo di L298N?
La L298N è un driver a doppio motore H-ponte che consente contemporaneamente il controllo della velocità e della direzione di due motori CC.
2. Perché il mio L298N non funziona?
Deve essere superiore a 4,5 V per il corretto funzionamento della L298.2. Perderai forse 2,5 V attraverso la L298.Forse non è rimasta abbastanza tensione per eseguire il motore.
3. Cos'è la L298N?
Il driver del motore L298N è un controller che utilizza un ponte H per controllare facilmente la direzione dei motori e PWM per controllare la velocità.Questo modulo consente di gestire in modo indipendente due motori fino a 2A ciascuno in entrambe le direzioni.La gamma di forniture può variare tra 5 V e 35 V, abbastanza per la maggior parte dei progetti motori CC.
4. Possiamo collegare 4 motori a L298N?
La risposta è sì e n. Dipende da come si utilizza il driver del motore L298N.L298N originariamente progettato per il controllo di due motori CC o un motore passo -passo.Ma, se non si desidera che ciascun motore ruoti all'indietro, puoi usare ciascun lato del driver L298N per controllare due motori CC e un totale di 4 motori.