Guida all'utilizzo di PIC16F877A per progetti motori Stepper
Il microcontrollore PIC16F877A è ampiamente utilizzato in molti progetti elettronici perché offre un buon equilibrio tra funzionalità e facilità d'uso.In questa guida, daremo uno sguardo ravvicinato al PIC16F877A, coprendo tutto, dai suoi modelli Pinut e CAD al suo utilizzo nel controllo dei motori a passo passo.Che tu stia costruendo un dispositivo semplice o un progetto di automazione complesso, capire come connettere e controllare i motori utilizzando questo microcontrollore ti aiuterà a ottenere i migliori risultati.
Catalogare

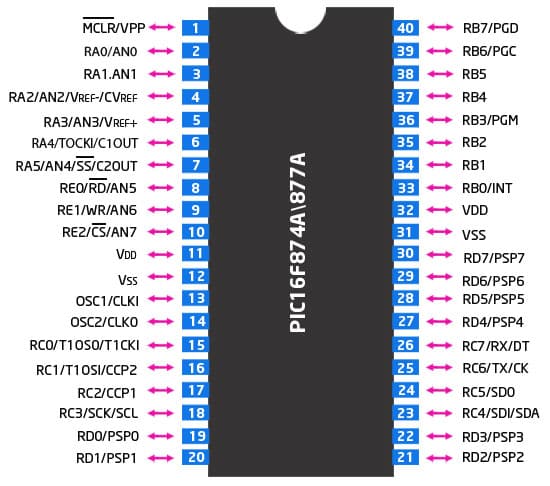
Configurazione del pin PIC16F877A
Modelli CAD per pic16f877a
Simbolo del diagramma PIC16F877A
L'impronta PCB PIC16F877A

Modello 3D
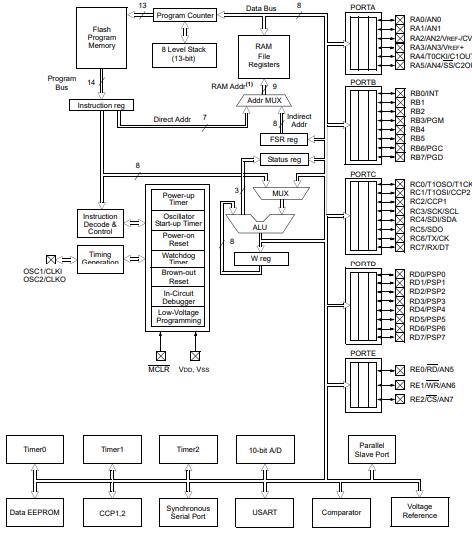
Pic16f877a Struttura interna
Specifiche tecniche dettagliate
| Tipo | Parametro |
| Tempo di consegna della fabbrica | 7 settimane |
| Montare | Attraverso il buco |
| Tipo di montaggio | Attraverso il buco |
| Pacchetto / caso | 40-Dip (0,600, 15,24 mm) |
| Numero di spille | 40 |
| Convertitori di dati | A/D 8x10b |
| Numero di I/OS | 33 |
| Timer del cane da guardia | SÌ |
| Temperatura operativa | -40°C ~ 85°C Ta |
| Confezione | Tubo |
| Serie | Foto® 16f |
| Pubblicato | 1997 |
| Codice JESD-609 | E3 |
| Codice Pbfree | SÌ |
| Stato parte | Attivo |
| Livello di sensibilità all'umidità (MSL) | 1 (illimitato) |
| Numero di terminazioni | 40 |
| Codice ECCN | Ear99 |
| Finitura terminale | Stagno opaco (sn) - ricotto |
| Funzione aggiuntiva | Opera a 4 V di alimentazione minima |
| Posizione terminale | Dual |
| Tensione di alimentazione | 5v |
| Frequenza | 20 MHz |
| Numero parte base | Pic16f877a |
| Conteggio dei perni | 40 |
| Fornitura di tensione-Max (VSUP) | 5,5 V. |
| APRITENZE | 5v |
| Tensione di alimentazione (VSUP) | 4.5v |
| Interfaccia | I2C, SPI, SSP, UART, USART |
| Dimensione della memoria | 14kb |
| Tipo di oscillatore | Esterno |
| Corrente di alimentazione nominale | 1.6 mA |
| Dimensione RAM | 368 x 8 |
| Tensione - Fornitura (VCC/VDD) | 4V ~ 5,5 V. |
| Tipo ICS UPS/UCS/PERIPHERAL | MicroController, RISC |
| Processore principale | Foto |
| Periferiche | Brown-out Rileva/reset, POR, PWM, WDT |
| Tipo di memoria del programma | FLASH |
| Dimensione del nucleo | 8 bit |
| Dimensione della memoria del programma | 14kb (8k x 14) |
| Connettività | I2C, SPI, UART/USART |
| Bit dimensioni | 8 |
| Tempo di accesso | 20 µS |
| Ha ADC | SÌ |
| Canali DMA | NO |
| Larghezza del bus dati | 8b |
| Numero di timer/contatori | 3 |
| Larghezza del bus degli indirizzi | 8b |
| Densità | 112 kb |
| Dimensione Eeprom | 256 x 8 |
| Famiglia CPU | Foto |
| Numero di canali ADC | 8 |
| Numero di canali PWM | 2 |
| Numero di canali I2C | 1 |
| Altezza | 4,06 mm |
| Lunghezza | 52,45 mm |
| Larghezza | 14,22 mm |
| Raggiungere svhc | Nessun svhc |
| Indurimento da radiazioni | NO |
| Stato ROHS | ROHS3 conforme |
| Senza piombo | Senza piombo |
Comprensione dei motori a passo passo
Un motore passo -passo è un tipo di motore elettrico che si muove in passaggi specifici piuttosto che in movimento continuo come i motori tradizionali.Questi movimenti passo-passo sono misurati in gradi, che possono variare a seconda dell'applicazione.
I motori Stepper possono funzionare in diverse modalità: wave Drive, Full Drive e Half Drive.Ogni modalità controlla il modo in cui le fasi del motore sono energizzate, influenzando le sue prestazioni e rendendolo adatto a vari usi.
In modalità wave drive, solo una fase del motore è alimentata alla volta.Questa semplice modalità di controllo è utile per le situazioni in cui l'efficienza energetica è prioritaria sulla coppia, ad esempio nelle attività di automazione di base in cui è necessaria una corrente iniziale minima.
La modalità di trasmissione completa alimenta due fasi contemporaneamente.Ciò si traduce in una produzione di coppia più elevata poiché due bobine lavorano insieme, rendendolo ideale per le applicazioni in cui sono necessarie precisione e resistenza, come in robotica e macchinari a CNC.
La modalità a metà drive combina le caratteristiche di Wave e Drive Full energizzando alternativamente una fase e due fasi.Questo approccio fornisce gradini più piccoli, raddoppiando efficacemente la risoluzione del motore.La mezza drive è più adatta per applicazioni come la stampa 3D e la strumentazione fine, dove sono essenziali il movimento regolare e il posizionamento preciso.
Quando si sceglie un motore passo -passo per un uso specifico, considerare l'ambiente operativo.Per le attività ad alta precisione, si consiglia la modalità a metà dell'unità per garantire transizioni fluide e vibrazioni ridotte.Per i progetti incentrati sul risparmio energetico, la modalità Wave Drive può essere più appropriata.
La selezione della modalità giusta richiede fattori di bilanciamento come coppia, velocità e complessità del sistema.La scelta della modalità corretta può influenzare significativamente le prestazioni del motore e l'efficienza complessiva del sistema.
Collegamento di un motore passo -passo con pic16f877a
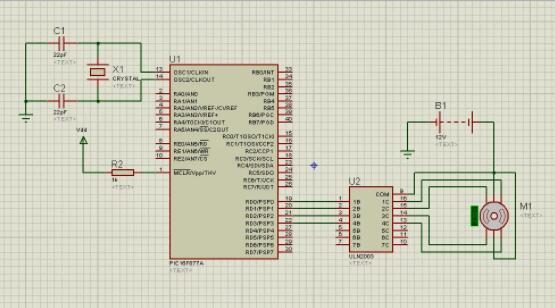
Per collegare un motore passo -passo con a Pic16f877a Microcontroller, è possibile utilizzare l'array di transistor ULN2003.Questo circuito integrato, progettato per motori ad alta torque, contiene sette coppie darlington.I bit PORTD inferiori del microcontrollore sono collegati ai pin di ingresso (1b, 2b, 3b, 4b) dell'ULN2003, mentre i suoi pin di uscita (1C, 2C, 3C, 4C) si collegano ai pin del motore Stepper.I pin comuni del motore e il perno COM dell'ULN2003 sono collegati a un alimentatore a 12 V.
I motori a passo sono comunemente utilizzati per applicazioni che richiedono un controllo di movimento preciso.Convertono gli impulsi digitali in rotazione meccanica, rendendoli ideali per dispositivi come macchine a CNC e stampanti 3D, dove la posizione e la velocità devono essere attentamente regolate.
L'ULN2003 svolge un ruolo chiave nel controllo dei motori Stepper a causa della sua capacità di gestire la corrente elevata e la sua facile interfaccia con i microcontrollori.Se collegati al PIC16F877A, i bit Portd inferiori vengono utilizzati per controllare il motore passo -passo.Questa configurazione fornisce un controllo preciso dei gradini, garantendo un movimento e un posizionamento accurati.
L'uso dell'ULN2003 nelle configurazioni di controllo del motore è altamente affidabile nelle applicazioni del mondo reale.Aiuta a ridurre al minimo i problemi come passaggi mancati o posizionamento errato, migliorando le prestazioni complessive.La manutenzione e la calibrazione regolari basate sui dati di utilizzo possono ottimizzare ulteriormente la funzione del motore, garantendo stabilità a lungo termine e funzionamento preciso.
Regolazione della velocità del motore passo -passo
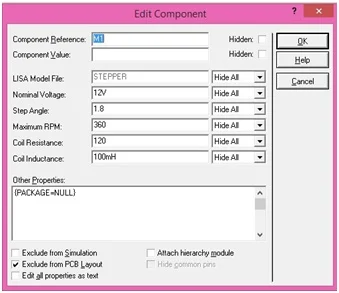
La velocità del motore passo -passo può essere accuratamente modificata utilizzando il software di simulazione Proteus.Accedendo alle impostazioni del motore tramite "Modifica proprietà", è possibile effettuare regolazioni a parametri come il numero di passaggi e l'angolo del passaggio.Ad esempio, un motore a 200 fasi divide una rotazione completa (360 °) in 200 passi, rendendo ogni passaggio di 1,8 °.La modifica di queste impostazioni in Proteus rifletterà dinamicamente durante la simulazione.
In pratica, i motori a passo passo sono spesso impiegati in settori in cui il controllo preciso del movimento è cruciale, come in macchinari e robotica a CNC.Regolando l'angolo del passaggio e il numero di passaggi sottili per ottenere il movimento esatto richiesto per attività specifiche.
La modifica dei parametri del motore Stepper influisce sulle caratteristiche delle prestazioni come coppia e risoluzione.Ad esempio, aumentare il numero di passaggi generalmente migliora la risoluzione, ma può influire sulla coppia e sui tempi di risposta.Comprendere questi compromessi attraverso la simulazione aiuta a prendere decisioni informate.
Una prospettiva sfumata rivela che gli aggiustamenti iterativi, seguiti da prove pratiche, portano a un design del motore più robusto.Garantire che le simulazioni digitali rispecchino da vicino i risultati del mondo reale è fondamentale.Le sfumature di configurare un motore passo -passo risiedono davvero nel trovare un equilibrio tra precisione teorica e fattibilità pratica.
Programmazione di un motore passo -passo con pic16f877a
Questa sezione copre come programmare un motore passo -passo utilizzando il microcontrollore PIC16F877A, spiegando diverse modalità di guida e fornendo una guida pratica per un'implementazione efficace.
Ecco un codice di esempio di base per dimostrare il controllo del motore Stepper utilizzando la modalità di trasmissione completa:
void main ()
{
Trisd = 0B00000000;// Imposta Portd come output
Portd = 0B11111111;// Inizializza portd
Fare
{
Portd = 0B00000011;// energizza due fasi contemporaneamente
Delay_ms (500);// ritardo di 0,5 secondi
Portd = 0B00000110;
Delay_ms (500);
Portd = 0B00001100;
Delay_ms (500);
PORTD = 0B00001001;
Delay_ms (500);
} while (1);// Loop indefinitamente
}
In questo codice, PORTD di PIC16F877A è configurato come porta di output per controllare il motore passo -passo tramite il driver ULN2003.La sequenza di comandi energizza due fasi del motore passo -passo alla volta, che è caratteristica della modalità di guida completa.Questa modalità contiene il rotore in posizione fissa con una coppia massima ma in genere consuma più potenza.
La modalità di trasmissione completa non è l'unico modo per controllare i motori a passo passo.Le modalità Wave Drive e Half Drive forniscono alternative basate su requisiti specifici.L'unità d'onda eccita solo una fase alla volta, il che riduce il consumo di energia ma si traduce in una coppia inferiore.La mezza guida si alterna tra una e due fasi, offrendo una risoluzione più elevata e un movimento più fluido.
Durante la programmazione dei motori passo -passo, scegli la modalità di guida che si adatta meglio alle tue esigenze, sia per un posizionamento preciso, l'efficienza energetica o la coppia massima.
Applicazioni pratiche di motori a passo passo
I motori a passo sono ampiamente utilizzati in molti settori a causa della loro capacità di fornire un controllo preciso e prestazioni affidabili.La loro versatilità li rende adatti a tutto, dalle auto e negli elettrodomestici alle macchine industriali e ai dispositivi medici.
Nel mondo automobilistico, i motori passo -passo svolgono un ruolo chiave nel controllo di sistemi come l'acceleratore, i fari e l'aria condizionata.Aiutano a perfezionare questi componenti, assicurandosi che i veicoli funzionino senza intoppi ed efficiente.Nel frattempo, in attrezzature per ufficio come stampanti e fotocopiatrici, i motori passo -passo gestiscono attività come l'alimentazione della carta e il posizionamento dell'inchiostro.Questa precisione garantisce una qualità di stampa costante e un funzionamento regolare nel tempo.
A casa, elettrodomestici come lavatrici e lavastoviglie si affidano ai motori a passo passo per controllare il flusso d'acqua e la rotazione del tamburo, garantendo che tutto funzioni perfettamente.In contesti industriali, i motori Stepper sono cruciali per le macchine a CNC e le armi robotici, dove forniscono i movimenti esatti necessari per la produzione ad alta precisione.
I sistemi di sicurezza beneficiano anche del movimento affidabile dei motori Stepper.In dispositivi come telecamere di sorveglianza e blocchi automatizzati, i motori a passo passo consentono un posizionamento regolare e accurato, che è essenziale per un monitoraggio e una sicurezza efficaci.Nell'assistenza sanitaria, i motori Stepper vengono utilizzati in dispositivi medici come pompe per infusione e attrezzature per imaging, dove offrono il controllo preciso necessario per un funzionamento sicuro e accurato.
Man mano che la tecnologia continua a evolversi, i motori Stepper dovrebbero trovare ancora più applicazioni in campi emergenti come robotica e veicoli autonomi.Il loro continuo sviluppo porterà probabilmente a una precisione ed efficienza ancora maggiore, ampliando il loro ruolo in vari settori.
Parti comparabili del microcontrollore
| Numero parte | Pic16f877a-i/p | Pic16f77-i/p | Pic16f74-i/p | Pic16f777-i/p |
| Produttore | Tecnologia di microchip | Tecnologia di microchip | Tecnologia di microchip | Tecnologia di microchip |
| Pacchetto / caso | 40-Dip (0,600, 15,24 mm) | 40-Dip (0,600, 15,24 mm) | 40-Dip (0,600, 15,24 mm) | 40-Dip (0,600, 15,24 mm) |
| Numero di spille | 40 | 40 | 40 | 40 |
| Larghezza del bus dati | 8 b | 8 b | 8 b | 8 b |
| Numero di I/O. | 33 | 33 | 33 | 36 |
| Interfaccia | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, UART, USART |
| Dimensione della memoria | 14 kb | 7 kb | 14 kb | 14 kb |
| Tensione di alimentazione | 5 v | 5 v | 5 v | 5 v |
| Periferiche | Brown-out Rileva/reset, POR, PWM, WDT | Brown-out Rileva/reset, POR, PWM, WDT | Brown-out Rileva/reset, POR, PWM, WDT | Brown-out Rileva/reset, POR, PWM, WDT |
| Visualizza confronta | Pic16f877a-i/p Vs Pic16f77-i/p | Pic16f877a-i/p Vs Pic16f77-i/p | Pic16f877a-i/p Vs Pic16f74-i/p | Pic16f877a-i/p Vs Pic16f777-i/p |
Domande frequenti [FAQ]
1. Cosa usa un motore passo -passo per generare movimento meccanico?
Un motore passo -passo genera un movimento meccanico usando impulsi elettrici.
2. Cosa fa un motore passo -passo?
Un motore passo -passo si sposta in passaggi discreti.
3. Come vengono misurati i motori passo -passo?
I motori a passo successivo sono misurati in gradi.
4. Quanti passaggi fa un motore passo -passo?
Un motore passo -passo si muove un passo alla volta.
5. Quante modalità di eccitazione ha un motore passo -passo?
Un motore passo -passo ha tre modalità di eccitazione.
6. Qual è il modo più semplice per collegare un motore passo -passo?
Il modo più semplice è collegarlo a un microcontrollore PIC16F877A.
7. Quanti pin di ingresso dell'ULN2003 sono collegati ai bit significativi più bassi del PORTD del microcontrollore?
Quattro pin di input sono collegati ai bit significativi più bassi del PORTD del microcontrollore
Su di noi
ALLELCO LIMITED
Leggi di più
Richiesta rapida
Si prega di inviare una richiesta, risponderemo immediatamente.
Perché scegliere il chip di memoria ADESTO RM25C64DS-LTAI-B per il tuo progetto?
su 10/10/2024
PC817 OptoCoupler: funzionalità e applicazioni moderne
su 10/10/2024
Post popolari
-
Cos'è GND nel circuito?
su 01/01/1970 2838
-

Guida del connettore RJ-45: codici a colori del connettore RJ-45, schemi di cablaggio, applicazioni R-J45, fogli dati RJ-45
su 01/01/1970 2410
-

Tipi di connettore in fibra: SC vs LC e LC vs MTP
su 01/01/1970 2023
-
Comprensione delle tensioni di alimentazione in elettronica VCC, VDD, VEE, VSS e GND
su 05/11/0400 1768
-

Confronto tra DB9 e rs232
su 01/01/1970 1730
-

Cos'è una batteria LR44?
L'elettricità, quella forza onnipresente, permea silenziosamente ogni aspetto della nostra vita quotidiana, dai gadget banali alle attrezzature mediche potenzialmente letali, svolge un ruolo silenzioso.Tuttavia, afferrare davvero questa energia, in particolare come archiviarla e sufficiente efficiente, non è un compito facile.È in questo contesto che questo articolo si concentrerà su un tipo d...su 01/01/1970 1681
-
Comprensione dei fondamentali: resistenza all'induttanza e papacità
Nell'intricata danza dell'ingegneria elettrica, un trio di elementi fondamentali è al centro della scena: induttanza, resistenza e capacità.Ognuno porta tratti unici che determinano i ritmi dinamici dei circuiti elettronici.Qui, intraprendiamo un viaggio per decifrare le complessità di questi componenti, per scoprire i loro ruoli distinti e usi pratici all'interno della vasta orchestra elettric...su 01/01/1970 1628
-

Guida completa della batteria CR2430: specifiche, applicazioni e confronto con le batterie CR2032
Cos'è la batteria CR2430?Vantaggi delle batterie CR2430NormaApplicazioni a batteria CR2430CR2430 equivalenteCR2430 VS CR2032Batteria CR2430 DimensioniCosa cercare quando si acquista il CR2430 e gli equivalentiScheda dati PDFDomande frequenti Le batterie sono il cuore di piccoli dispositivi elettronici.Tra i molti tipi disponibili, le cellule di monete svolgono un ruolo cruciale, comunemente prese...su 01/01/1970 1497
-

CR2450 vs CR2032: è invece utilizzare la batteria?
Le batterie al manganese al litio hanno alcune somiglianze con altre batterie al litio.L'elevata densità di energia e la lunga durata sono le caratteristiche che hanno in comune.Questo tipo di batteria ha vinto la fiducia e il favore di molti consumatori per la sua sicurezza unica.Costosi gadget tecnologici?Piccoli elettrodomestici nelle nostre case?Guardati intorno e li vedrai ovunque.Tra queste...su 01/01/1970 1471
-
Cos'è RF e perché lo usiamo?
La tecnologia a radiofrequenza (RF) è una parte fondamentale della moderna comunicazione wireless, consentendo la trasmissione dei dati su lunghe distanze senza connessioni fisiche.Questo articolo approfondisce le basi di RF, spiegando come le radiazioni elettromagnetiche (EMR) rendono possibile la comunicazione RF.Esploreremo i principi di EMR, la creazione e il controllo dei segnali RF e i loro...su 01/01/1970 1455
Numero di parte caldo
-

KSH45H11ITU
onsemi
TRANS PNP 80V 8A IPAK
MRF6S21050LR3
NXP USA Inc.
FET RF 68V 2.16GHZ NI-400
H11A5SVM
onsemi
OPTOISO 7.5KV TRANS W/BASE 6SMD
M24C04-RDW6TP
STMicroelectronics
IC EEPROM 4KBIT I2C 8TSSOP
12101U102JAT2A
KYOCERA AVX
CAP CER 1000PF 100V NP0 1210
LTC2321IUFD-16#PBF
Analog Devices Inc.
IC ADC 16BIT SAR 28QFN
MURB1060CT
Yangjie Technology
TO-263 600V 10A Diodes Rectifi
A4983SETTR-T
Allegro MicroSystems
IC MTR DRV BIPOLAR 3V-5.5V 28QFN
FQPF5N30
onsemi
MOSFET N-CH 300V 3.9A TO220F
CY14B101KA-ZS25XI
Infineon Technologies
IC NVSRAM 1MBIT PAR 44TSOP II
MAX2820EGM
Analog Devices Inc./Maxim Integrated
2.4GHZ 802.11B ZERO-IF TRANSCEIV
SI7170DP-T1-GE3
Vishay Siliconix
MOSFET N-CH 30V 40A PPAK SO-8
FDC6323L
onsemi
IC PWR SWITCH P-CH 1:1 SUPERSOT6
MX25R8035FZUIH1
Macronix
IC FLASH 8MBIT SPI/QUAD 8USON
12065C823MAT2A
KYOCERA AVX
CAP CER 0.082UF 50V X7R 1206
MAX6160EUS-T
Analog Devices Inc./Maxim Integrated
IC VREF SERIES ADJ 1% SOT143-4
LTM8020EV#PBF
Analog Devices Inc.
DC DC CONVERTER 1.25-5V
GRM0225C1E5R9WA03L
Murata Electronics
CAP CER 5.9PF 25V C0G/NP0 01005 -

FH19SC-10S-0.5SH(82)
Hirose Electric Co Ltd
CONNECTOR
TPS2231RGPT
Texas Instruments
IC PWR SWITCH 1:1 20QFN
EMK1HM101FB0D00R
Aishi Capacitors (Hunan Aihua Group
ALUMINUM E-CAP SMT
08051A301JAT2A
KYOCERA AVX
CAP CER 300PF 100V NP0 0805
AD743JRZ-16
Analog Devices Inc.
IC OPAMP JFET 1 CIRCUIT 16SOIC
V23105A5307A201
TE Connectivity Potter & Brumfield Relays
RELAY TELECOM DPDT 3A 48V
MCP1703AT-2502E/MB
Microchip Technology
IC REG LINEAR 2.5V 250MA SOT89-3
NTLJD3115PTAG
onsemi
MOSFET 2P-CH 20V 2.3A 6-WDFN
045803.5DR
Littelfuse Inc.
FUSE BOARD MNT 3.5A 48VAC 75VDC
CFUKG455KG1A-R0
Murata Electronics
FILTER
PIC32MX795F512L-80I/PF
Microchip Technology
IC MCU 32BIT 512KB FLASH 100TQFP
XC3S1500-4FG676I
AMD
IC FPGA 487 I/O 676FCBGA
WSL36374L000FEA
Vishay Dale
RES 0.004 OHM 1% 3W 3637
BZT52B33
Yangjie Technology
SOD-123 33V 0.5W Diodes Zener
T8132NLT
Pulse Electronics
CMC 16LN SMD
AT24C32A-10TI-2.7
Microchip Technology
IC EEPROM 32KBIT I2C 8TSSOP
MCP1824T-3302E/OT
Microchip Technology
IC REG LINEAR 3.3V 300MA SOT23-5
MP9361DJ-LF-Z
Monolithic Power Systems Inc.
IC REG CHARGE PUMP 5V TSOT23 -

AD5311BRM-REEL
Analog Devices Inc.
IC DAC 10BIT 2WIRE W/BUFF 8-MSOP
SIE848DF-T1-GE3
Vishay Siliconix
MOSFET N-CH 30V 60A 10POLARPAK
GRM2196S2A430JZ01D
Murata Electronics
CAP CER 43PF 100V S2H 0805
EL5362IS
Renesas Electronics America Inc
IC OPAMP CFA 3 CIRCUIT 16SOIC
HMC697LP4E
Analog Devices Inc.
RF MODULATOR 200MHZ-4GHZ 24VFQFN
SMBG13A-E3/52
Vishay General Semiconductor - Diodes Division
TVS DIODE 13VWM 21.5VC DO215AA
TC2054-2.8VCTTR
Microchip Technology
IC REG LINEAR 2.8V 50MA SOT23-5
MAX1241CESA
Analog Devices Inc./Maxim Integrated
IC ADC 12BIT SAR 8SOIC
DS1848B-010+
Analog Devices Inc./Maxim Integrated
IC RES/MEM TEMP 10/10K 16-BGA
GRM0335C1E9R8DA01D
Murata Electronics
CAP CER 9.8PF 25V C0G/NP0 0201
MPQ6400DG-33-AEC1-LF-Z
Monolithic Power Systems Inc.
IC SUPERVISOR 1 CHANNEL 6QFN
GRM216R71H182KA01D
Murata Electronics
CAP CER 1800PF 50V X7R 0805
SN74ALS11ANS
Texas Instruments
IC GATE AND 3CH 3-INP 14SO
HFA1100IP
Harris Corporation
IC OPAMP CFA 1 CIRCUIT 8DIP
MAX3232ESE+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 2/2 16SO
08051AR75CAT2A
KYOCERA AVX
CAP CER 0.75PF 100V C0G/NP0 0805
MB86967PMC-G-JNE1
Infineon Technologies
IC MICROCONTROLLER
AT90PWM81-16SN
Microchip Technology
IC MCU 8BIT 8KB FLASH 20SOIC